
ロボットアームが、月の南極環境模擬試験に合格
GITAIのインチワーム型ロボットアームが、月の南極環境を模擬した熱真空チャンバーで実施された統合テストに合格し、TRL6を達成した。
同社では、宇宙運用のコストを100倍に削減するため、軌道上サービス用のロボット衛星、インフラ建設用の月面ロボットローバー、両エリアで活用できるインチワーム型ロボットアームの開発を進めており、これらの技術はすべて社内で開発されている。
今年8月には、ロサンゼルス本社と宇宙ロボット製造施設を旧オフィスの4倍以上の新拠点に移転し、生産能力を拡充。月面を模擬した様々な環境試験も実施しており、その中には社内のレゴリス室でのレゴリス試験も含まれている。
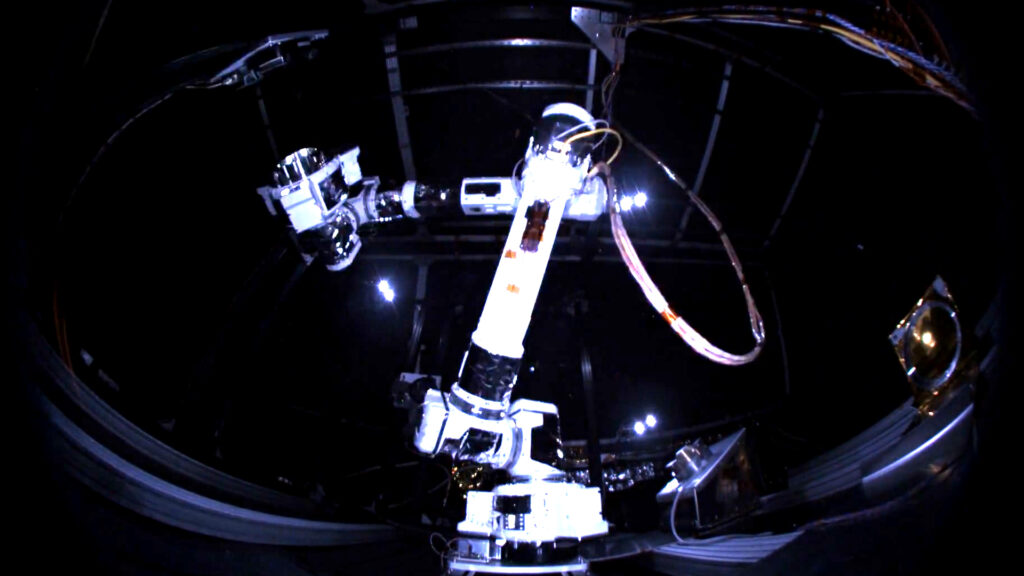
月面環境試験の最終段階として、熱真空チャンバー内での南極点を模した統合試験を実施した。試験中、恒久的な影のある地域の厳しい寒さから、月の昼間の暖かい温度まで、極端な温度変化をシミュレートしながら、連続運転を行った。
電力は主に、チャンバーの周囲に設置された4つのワイヤレス電力伝送システムによって供給され、最低温度では、環境は-140℃に達し、真空レベルは1E-5Torr未満。停電時にバッテリー電源のみで動作するロボットの能力もテストした。
こうした条件下でも、GITAIインチワーム型ロボットアームは、約1マイル(1,503歩)の距離を29時間連続で移動させることに成功。軌道上サービスのために標的衛星をドッキングするシミュレーション実験では、ツールチェンジャー機能を利用して専用のエンドエフェクターを装着し、対象衛星のセパレーションリングを捕捉できた。これらの月面南極点を模した熱真空チャンバーでの統合試験により、TRL6に到達した。

2024年11月15日